| パッケージの様な、かっちょイ〜ポーズを付けたかったので足を可動にしてみました。 結果、かな〜〜〜りぃ微妙でした。 足の可動範囲を広げるので、フロントアーマーも可動にしました。 作業しよい様に先にフロントアーマーを切り取ってます。 デザインナイフの先にエッチングソーをセットしてます。 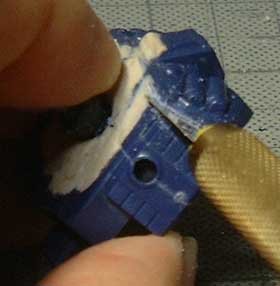  キットのボールジョイントの受けは使わないので。 足の関節パーツのボールジョイントに合う受けを、コトブキヤの「ポリユニット スタートセット2」から使います。 (たぶんスタートセット2だと思います、違ってても1か3です)   腰のパーツの邪魔な部分をカットします。   ここを平らにします。 ニッパーとかカッターとか使って邪魔な部分を頑張って、撤去っ。 緑の四角い部分に関節パーツを作り、設置します。 関節パーツを入れるために少し、腰の中心部分もカットしています。 緑の四角い部分ですが、そのために中のパテが見えてます。 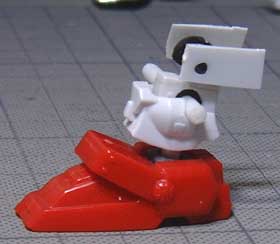 関節パーツを作るのに、ボールジョイントの受けにプラ板をセットしてます。 適当に切った長方形のプラ板の下の方に穴を開けて、それからボールジョイントにセット、「だいたい、こんなモンだろう」と適当にカットしました。 激しく適当にこの辺は作ってます、測るのが面倒くさいから・・・   プラ板で箱を作るので、裏にプラ板を接着、ハミ出た所はカット。 同じく、蓋を接着して、ハミ出た所はカット。 こんな感じで関節パーツの形が出来ました。   この箱にポリ軸を通すんですが、そのままだとプラ板の厚みが0.5か1ミリしかないので、これだとポリ軸の保持力が弱く、フニャフニャな関節になると思い。 緑の丸の部分に裏からプラ板を接着して厚みを足してます。 これでポリ軸のテンションを少しでも稼ぐ予定です。   このプラ板の箱、スペース的に小さく作らないといけなかったので、プラ板の厚みは薄いです。 それだとボールジョイントの横の軸の保持力が弱いので、少しでも強めようかと。 ボールジョイントの横の軸を少しだけ残してカット。 マイナスドライバーをライターで暖めて・・・   ボールジョイントの軸に、ペタァ〜 ペッタンコにして、プラ板に密着させました。 別に溶かしてなく、ペッタンコに押し潰しただけです、これで軸のテンションが強くなりました。  足を腰に入れてみました、こんな感じです。  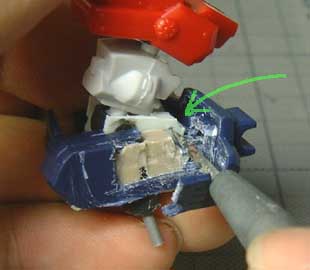 腰のボールジョイントの受けを撤去しているので、両足の接続にはポリ軸を使います。 ポリ軸を設置するために邪魔な部分をカットしました、緑色の丸の所です、腰パーツの後の方になります。 カットした部分に関節の軸がきます、軸の代わりにハリで足を押さえてます。 ハリを刺した所(緑の矢印の所)がポリ軸がくる所になるので、ハリを支点にして足を動かします。 ハリを「仮の関節軸」とします。 自分が考える可動のとうりの動きをした所がくるまで、足を動かし、ハリの押さえる場所を換え、アッチャこっちゃ探します。 ココだー!という軸がくる場所が見つかったら、印なりしておきましょう〜  ポリ軸には、ボールジョイントのランナーを使いました。 真ん中のチョボは残します、ポリランナーが足の可動と一緒に回転しないため、固定するのに利用します。   ハリでポリ軸の場所を探した所に穴を開け、ポリ軸を刺します。 斜めってる? ドンマ〜イ。 チャント足が自分の考えるとうりに可動すれば、エエんだからぁ〜   ポリ軸を設置して、パテで埋めて固定。 これで足・股関節の工作完了。 凄い遠回りの改造をしてるよ〜な・・・   カットしたフロントアーマーを接続します。 ウェーブの「A・スプリング」を使いました 接着面を稼ぐために先を少し曲げたスプリングをゼリー状の瞬着で固定して。 フロントアーマーで腰パーツを蓋をして、アルテコで固定しました。   普通の状態、足を上げた状態。 バネで固定しているので、足を上にあげても大丈夫。   正面から。 フロントアーマーが無いですけど、ライダーキックみたいなポーズとか。 これは少しパッケージのポーズに近づいたかな?   正面からはこんな感じ、右足はまだ関節を入れてません。 足の位置は元キットとあまり変わりありません。 片ヒザを付くとか。  こんな感じになります。 まあ〜、なんですね、してもしなくても変わりないですね・・・ 足が前に出るというのは良いんですけど、足を前に伸ばして地面に座れるという。 摩亜屈がしてどうする?ってな感じですが。 |